Research
Networked Hybrid Multi-agent Systems
Networked multi-agent systems, composed of a number of homogeneous/heterogeneous agents interconnected via communication channels, have shown their wide applicability in various areas, such as power grids, sensor networks, Boolean networks, vehicles and robotics. Particularly, coordination of networked multi-agent systems has attracted increasing attention, which involves consensus, formation control, rendezvous, synchronization, swarming, flocking, containment control, distributed optimization and learning, which can be applied to neuroscience for the scientific study of the nervous system since neuroscience research might influence data mining and artificial intelligence. A hybrid system is a dynamical system that exhibits both continuous and discrete dynamic behaviors–a system that can both flow (described by a differential equation or inclusion) and jump (described by a difference equation or inclusion), which can be analyzed by hybrid time trajectories in terms of hybrid time domain, hybrid arc and hybrid solution. Our research interests on hybrid systems include switching systems, impulsive systems, sampled-data/event-triggered systems, which can be used to model various CPSs, including networked multi-agent systems, physical systems with impact, multiple rigid body systems (robotic arms and UAVs), logic-dynamic controllers, and even Internet congestion. We mainly focus on considering networked factors into modeling hybrid multi-agent systems, including time-delays, sampled data and packet losses by the framework of hybrid systems. In addition, the controllability/pinning control of networked multi-agent systems are also interesting topics for us, where swarm intelligence (constraint optimization and multi-objective optimization) is taken into account.

|

|
| Formation control for UAVs with event-triggered mechanism | Switching formation control for UAVs |
Computer Vision and Deep Reinforcement Learning in Robotics
Artificial intelligence is intelligence exhibited by machines characterized of perception, understanding and decision-making, which draws upon the fields of computer science, mathematics, neuroscience and many others, by means of computational intelligence, machine learning and intelligent control, etc. Similarly, these three parts of AI, perception, understanding and decision-making, constitute one of the emphases of robotics and we focus on all these three parts. For perception and understanding, known as machine vision, we mainly concentrate on simultaneous localization and mapping (SLAM), and then semantic segmentation can be accomplished, which serves as an understanding of the environment. SLAM includes many classical tasks, such as depth recovery, visual odometry and flow estimation, etc. We take advantage of the combination of mechanism model and deep model to make good use of the edges of each, and multi-sensor data is fused, such as the camera and IMU, to improve the precision of system. Particularly, for performing missions faster and being robust to failure of any one of the robots, we concentrate our efforts on multiple-robot SLAM. Our research goal is to address this challenge by combining deep learning and a state of the art dense SLAM system. For decision-making, we propose trajectory planning and task allocation for robotics, in which a 3D dynamic environment is taken into account where other non-cooperative agents may obstruct the active quadrotor and for sake of the framework, collisions can be avoided in a dynamic environment. In addition, we spare our efforts on Deep Reinforcement Learning in navigation as well.

|

|

|
| Depth Estimation | Optical flow estimation | Semantic Segmentation |

|
|

|
| Aggressive flight | Multi-agent Reinforcement Learning | Multi-agent Reinforcement Learning |
Estimation and Security in Cyber-Physical Systems
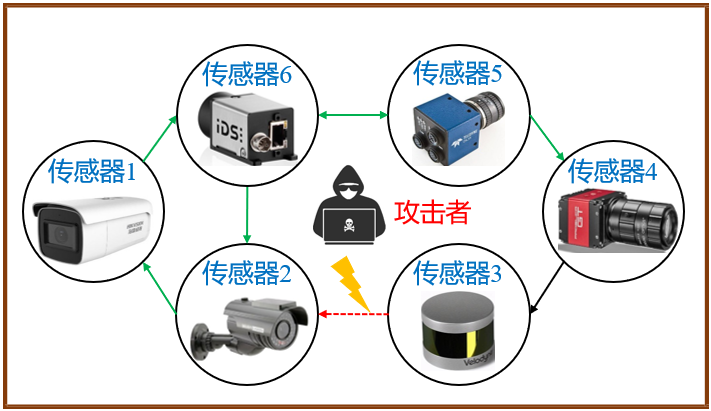
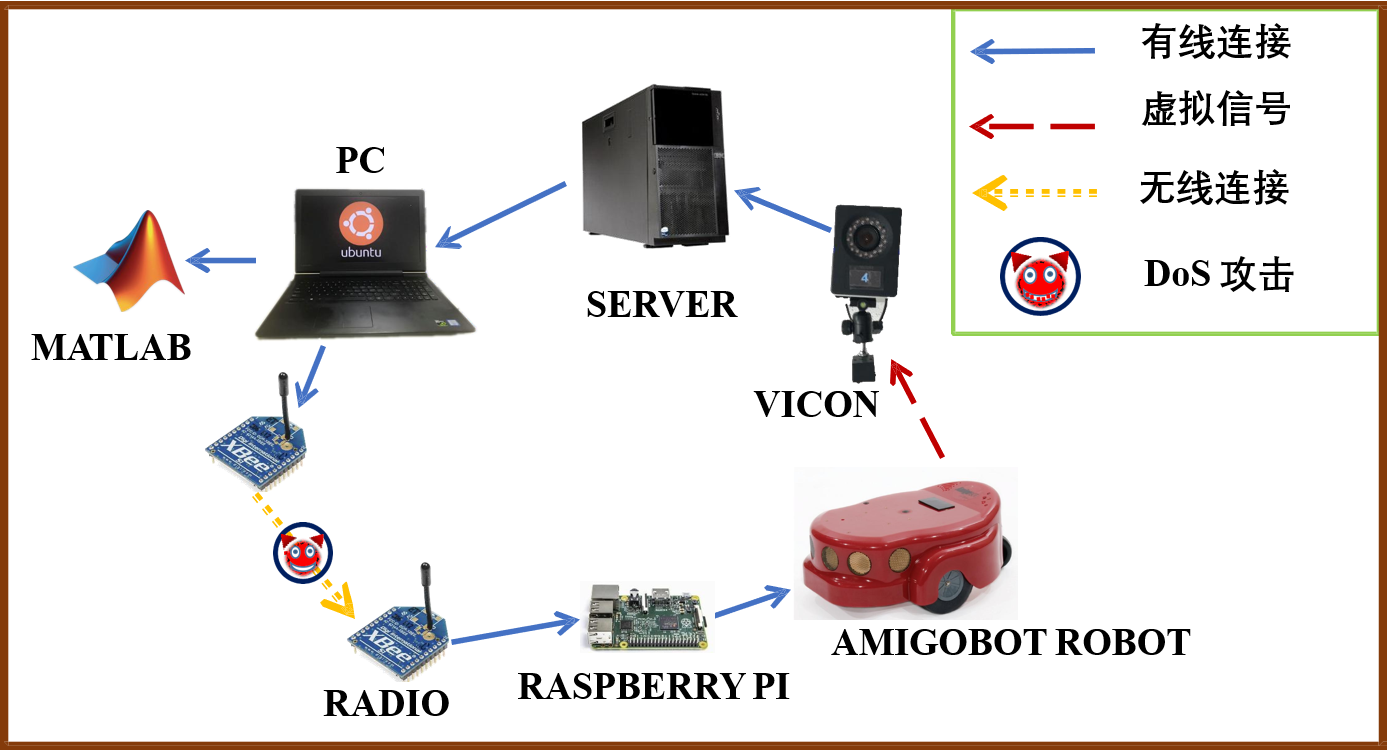
Cyber-physical systems (CPSs) refer to the next generation of engineered systems that require tight integration of computing, communication, and control technologies to achieve stability, performance, reliability, robustness, and efficiency in dealing with physical systems of many application areas, including intelligent transportation, finance, water and mine monitoring, aerospace and so on. Our researches mainly focus on the observability, controllability, adaptability, autonomy, efficiency, functionality, reliability, safety, and usability of CPSs in many relevant research domains such as networked control, hybrid systems, real-time computing, real-time networking, wireless sensor networks, cyber security, and model-driven development. Particularly, our recent concerns in CPSs with respect to security are deception attacks and denial-of-service (DoS) attacks. Our current focus is on distributed estimation, control and optimization for sensor networks. From the perspective of system theory, we simultaneously consider the perception and detection of various attacks by means of artificial intelligence methods in dealing with the systems’ security problem.
|
|
| Distributed sensor networks under network attacks | Experimentation testbed and hardware architecture |
Drug Discovery
Artificial intelligence (AI) plays a crucial role in drug design by significantly accelerating the discovery process and improving the precision of identifying potential drug candidates. Through advanced deep learning algorithms and data analysis, AI can analyze the complex structure-activity relationship relationships and can generate large amounts of chemical contents according to specific requirements on molecules, proteins and nucleic acids. This allows researchers to discover candidate drugs quickly, reducing the time and cost associated with traditional methods.
In recent research, we focus on host defense peptide (HDP)-mimicking polymers, which are promising therapeutic alternatives to antibiotics and have large-scale untapped potential. We develop a universal AI-guided few-shot inverse design framework and we successfully design a candidate polymer which exhibits broad-spectrum and potent antibacterial activity against multiple clinically isolated antibiotic-resistant pathogens, validating the effectiveness of AI-guided design strategy.
Our current focus is on structure-based drug discovery, including primary sequence generation and secondary structure synthesis tasks. We search for candidates with superior properties in the huge drug space, based on the fit of data patterns with various generative algorithms. To mine potential drug molecules, we incorporate methods like designing descriptors, modeling complexes, and establishing constraints through docking structures. These approaches are integrated into various AI-based techniques, including deep learning, deep reinforcement learning, and large models.

|

|
| Main pipeline for AI-guided polymer inverse design | Antibacterial Mechanism study |
Information Integration and Risk Early Warning in the Petrochemical Industry
For smart manufacturing in the petrochemical industries, information integration and risk early warning become an important research topic. Considering the diversity and complexity of big data, we consider the knowledge graph as a feasible strategy for information integration of decision making, which is a promising technique for integrating data. The knowledge graph includes several classical tasks, such as ontology design, information extraction and visualization, etc. Based on massive data including operation manuals, measurement data and HAZOP reports, we design and propose a specific ontology framework for the chemical industry. To overcome the information extraction difficulty caused by unstructured data, we take the advantage of the combination of named entity recognition, relation extraction and a special dictionary in petrochemical industries with designed ontologies and fuse information for the knowledge graph. For risk early warning, our research goal is to combine the Bayesian network, deep learning and knowledge graph to complete the complete identification of the causal chain of risk propagation, and finally realize risk assessment and decision-making. In addition, we utilize deep learning, including Bi-LSTM, and conditional random field to solve natural language processing tasks, such as the segmentation and sentiment analysis, in a knowledge base question answering (KBQA) system, which can improve the ability of human-machine-interaction. Further, we will use technologies such as causal learning, stable learning and time-series data prediction to mine the critical abrupt points of the system in the chemical production process from the actual operation data, and realize real-time risk warning for industrial production.

|
| Knowledge graph construction and intelligent question answering |
Applications
To bring these investigations aforementioned closer into real-world applications, based on the hardware platform under development, we are focusing on:
Applications of multi-agent systems: navigation and formation control by means of computer vision and deep reinforcement learning. The applications are carreid out on manipulators, vehicles and quadrotors.
Applications of artificial intelligence: early risk warning, human-machine-interaction and knowledge graph.
Equipments
|

|
| VICON Camera | Hummingbird |

|

|
| Matrice 100 | Quadrotors |